

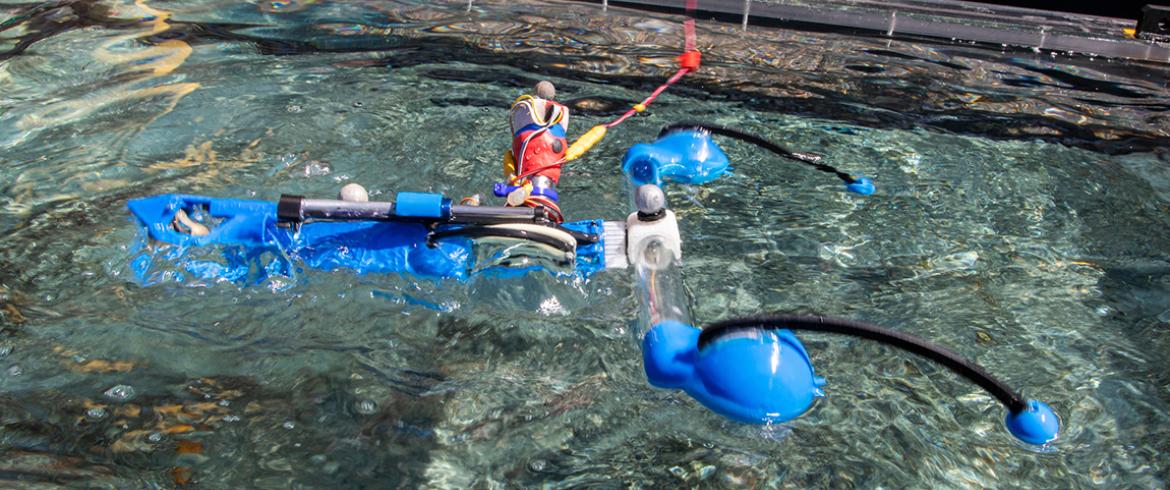
The AquaClimber is a swimming, climbing robot developed at CISCOR in Tallahassee, Florida. (M Wallheiser/FAMU-FSU Engineering)
It climbs like a gecko and freestyles when it hits the water. A feisty little robot called the AquaClimber is the latest bio-inspired robot designed by the researchers at CISCOR, the Center for Intelligent Systems, Control and Robotics lab, where inspiration comes from the natural world around us.
“At CISCOR, we want to understand the locomotion of animals and hope to use that understanding to help us design robots,” Max Austin, a mechanical engineering student at CISCOR said.
“We want to design robots who can traverse the world in the many diverse ways that we see in animals,” he explained. “Whether it’s climbing walls, running through forests, or gliding between trees, we build novel robots who can do many of these things, all on one platform.”
Austin, who recently received his doctorate at the FAMU-FSU College of Engineering, designed the AquaClimber with fellow graduate students Ashley Chase and Brian Van Stratum. Jonathan Clark, an associate mechanical engineering professor at the college, is the faculty lead on the project.
“We believe that AquaClimber is the first legged robot capable of both swimming and climbing, that can transition between modes,” Austin said.

The CISCOR group has been developing record-setting, high-speed climbing robots for some time. It’s an achievement accomplished using bio-inspired design. While the students were researching fast climbing robots, they noticed similarities in the motion swimmers used when they performed the freestyle stroke in swimming. The unexpected insight ultimately led to the AquaClimber.
“We used the same modeling techniques we use to analyze and predict behaviors in our climbing robots to see if how these same motions might work in swimming,” Austin said. “To our surprise, many of the physical features we found applied to swimming applied, so the novel idea of the AquaClimber seemed possible.”
The students working with the AquaClimber are also members of the college’s NASA Big Idea Challenge team, chosen by NASA to develop a lunar robot. The NASA team designed the Extreme Terrain Quadruped (ET-Quad) for the NASA challenge. The AquaClimber, in contrast to the NASA robot, was designed for use on Earth.
“The lunar robot project we worked on with NASA over the summer is a direct extension of this AquaClimber research,” Clark said. “However, this robot has the ability for real-world applications on Earth, such as search and rescue tasks in a natural disaster and environmental surveying.”
Austin says that robots with the multi-modal locomotion capabilities of AquaClimber can be particularly useful in assisting in recovery from natural disasters, such as hurricanes with heavy story surges and debris, that can be dangerous for people to navigate.
In the future, the team would like to continue to use these modeling techniques to build a tri-model quadruped that can autonomously run, climb and swim over a wide range of natural terrains. Their work was recently published in the journal Bioinspiration and Biomimetics.
The project was supported by, the Collaborative Technology Alliance Program, Cooperative Agreement DAAD, and the National Science Foundation.
RELATED ARTICLES
Engineering Students Design Four-Legged Lunar Robot for NASA’s BIG Idea Challenge
L3Harris Technologies Honors Engineering Professors for Their Work with Bomb-Defusing Robotics
New COBRA robot flies and rolls and looks like a drone on wheels