Content to date
Team 521 has completed year one of a two-year process to design and construct an autonomous robotic boat for the 2025 RoboBoat competition. Our team has integrated CANbus modules, microcontrollers, GPS, IMU, Velodyne LiDAR, T200 thrusters, and a camera, enabling our RoboBoat to navigate a marine environments with precision and agility. Pushing the boundaries of marine robotics technology, we have created a robust and intelligent boat capable of operating independently in challenging aquatic competition. Our goal was to put the 2025 RoboBoat team in a positon to compete and perform succesfully.
View our content to date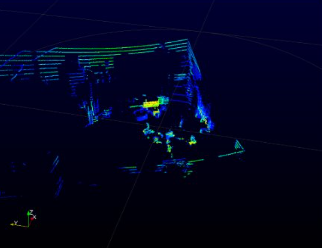
Navigation
For the navigation aspect of our autonomous boat, we've successfully integrated LiDAR technology to map out the challenge course. Using the detailed LiDAR-generated maps, we've pinpointed precise waypoints that will guide the boat through the course optimally. These waypoints are then fed into a Matlab simulation, allowing us to plan and test our navigation algorithms in a controlled virtual environment. Once we've refined the navigation commands in the simulation, we transfer the motor commands to the microcontrollers onboard the boat. This process not only streamlines the path planning but also ensures that our boat responds accurately to the environment, adapting its course in real-time to reach its destination efficiently.

Structure
In the structural department of our autonomous robotic boat, we've taken several measures to fortify the hull. We have waterproofed it with Flex Seal, ensuring it's sealed against any water penetration. The interior has been spray-painted to protect the surfaces from moisture and to prevent corrosion over time. Additionally, we've reinforced the hull with wooden planks to provide extra rigidity and to better withstand the dynamic marine environment.
Mechatronics
Our mechatronic system's proficiency hinges on the integration of Blue Robotics ESCs, which pilot the T200 thrusters based on directives from our navigational system. These controllers are integral, transforming navigational inputs into propulsive action. The ESCs interface with our navigation system, harnessing LiDAR data to manipulate the thrusters, thus facilitating precise and agile movements of the vessel. The synchronization between the navigation system and the ESCs is maintained through the CANbus network. This setup ensures that command signals to the thrusters are delivered with utmost priority and fidelity, upholding our commitment to responsive and reliable navigation. The CANbus architecture provides a streamlined and robust communication channel, instrumental for the harmonized operation of our autonomous boat's complex systems.
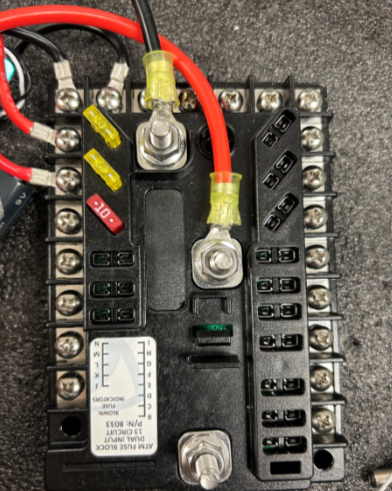
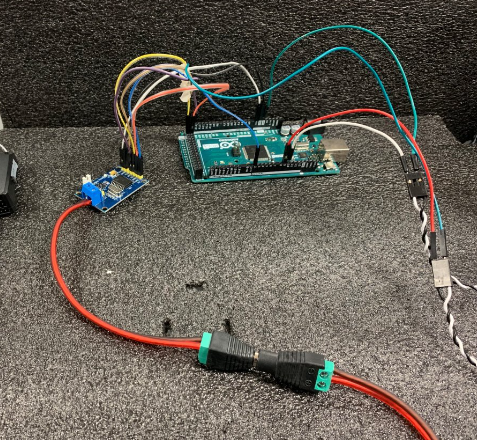
Electronics
Moving on to the electronics, we have meticulously mounted the thrusters, which are critical for the maneuverability and propulsion of the boat. A fuse panel has been installed to manage the electrical distribution safely and to protect the circuitry from any overcurrent incidents. For power regulation, we've added a DC-to-DC boost converter, which steps up the voltage to the required level, along with a 5V voltage regulator to ensure a stable power supply to all electronic components. These electronic improvements are integral for the operational reliability of our boat during the competition.
Future Work
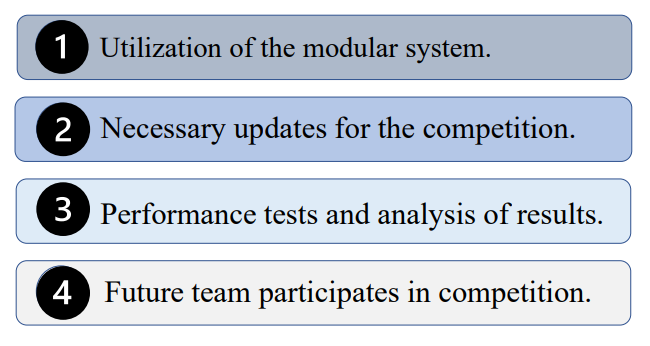
Looking ahead, we’ve charted a course for continued progress. Our immediate next step is to tap fully into the modular system’s versatility which is essential for swift adaptations. With the competition on the horizon, we’re gearing up for targeted updates to enhance our boat's competitive edge. We’ll then dive into a cycle of performance testing, dissecting the outcomes to fine-tune our approach. And when the time comes, we’ll pass the baton to the next crew, equipped with our insights and ready to make waves in future challenges.
Our Team
Meet the dedicated members of Team 521.

