

Clever, by nature, there’s a new robot in town that flies and rolls, and the possibilities for applications are endless.
Camilo Ordóñez, Ph.D. and Oscar Chuy, Jr., Ph.D., researchers from the FAMU-FSU College of Engineering, are working with Tomas Fajardo, an engineer at Lockheed Martin to design a robot that looks like a drone on wheels. Named COBRA (COllaborative Bot with multi-Rotor Actuation), the machine can navigate in complex terrain using both wheels and propellers.

Camilo Ordóñez, Ph.D.

Oscar Chuy, Jr., Ph.D.
“Most existing robots focus on one mode of locomotion at a time, “Ordóñez explained. “We hope to significantly enhance the maneuverability and traction capabilities of wheeled robots by focusing on the cooperation of wheels and propellers.”
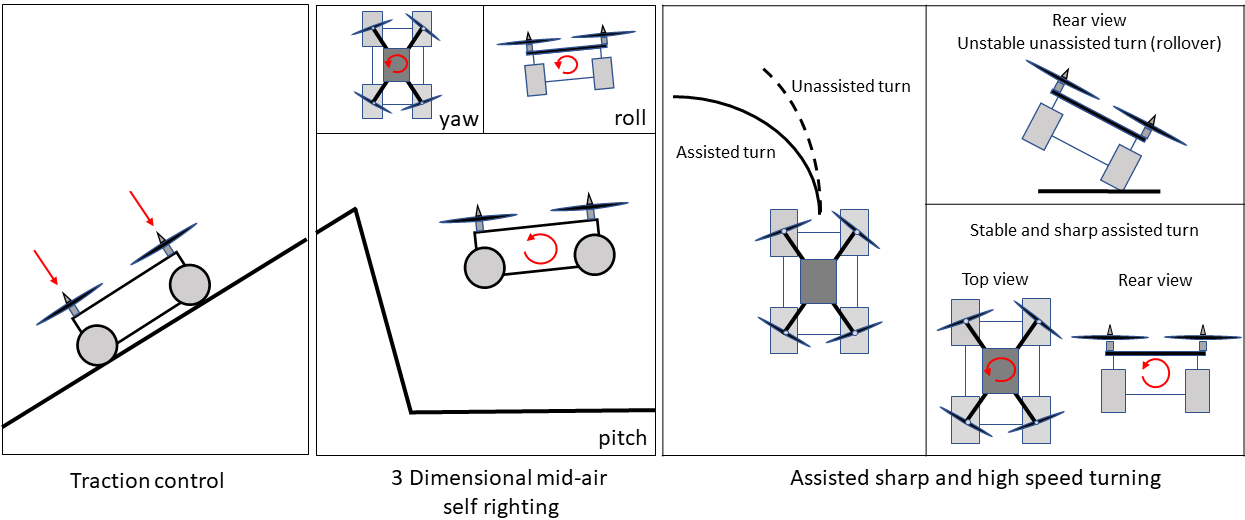
COBRA can climb and descend steep, slippery hills, navigate in soft ground, and perform mid-air self-righting maneuvers while jumping. The robot can execute sharp, high-speed turns while minimizing the chance for rollover, giving it applications for search and rescue missions, firefighting, agriculture, and the inspection of structures as well as combat missions for the military.
“When COBRA’s propellers cooperate with its wheels and generate the proper amount of thrust, the traction and stability of the robot increases,” Ordóñez said. “The result is a robot that can climb steep, slippery hills—which are otherwise non-traversable.”
COBRA is a single unit with propellers permanently attached. Ordóñez is working to enhance navigation in soft ground, like mud and snow, while Chuy is working on creating aerial and wheeled platforms that can change configuration during maneuvers.
“The propellers are permanently attached to the robot,” Chuy explained. “What we want to create is an aerial and wheeled platform that can autonomously couple and decouple during crucial instances of the robot’s mission.”
Several engineering students helped develop COBRA, including Fajardo, who graduated in 2019 with a master’s degree in mechanical engineering. Benjamin Bazyler, Diego Gonzalez, Ryan Alicea and Ariel Matthias also made contributions to the project. Fajardo explained what it was like to work on COBRA while finishing up his degree.
“Working with Dr. Ordoñez and Dr. Chuy allowed me to apply my knowledge into an experimental platform and learn valuable lessons I will continue to apply throughout my career,” Fajardo said. “Now, as a working engineer, it’s great to see COBRA with its many achievements, continue to improve.”
Ordonez and Chuy are faculty members at FAMU-FSU Engineering, in mechanical engineering and electrical/computer engineering, respectively.
Researchers from the college conduct experimentation at the Center for Intelligent Systems, Control, and Robotics (CISCOR). There are efforts within CISCOR, at the Optimal Robotics Lab, led by Christian Hubicki, Ph.D., assistant professor of mechanical engineering, and the Scansorial and Terrestrial Robotics and Design Lab, led by associate professor of mechanical engineering Jonathan Clark, Ph.D. to develop specialized areas of robotic mobility.

COBRA robot
“We have plans within CISCOR with Dr. Hubicki and Dr. Clark to extend this work to a multimodal platform capable of rolling, running, and flying,” Ordóñez said.
In the next five to ten years, the researchers expect to see a rich set of behaviors such as sharp cornering, mid-air self-righting and soft ground navigation in the COBRA platform. The maneuvers will require the development of motion planning and control techniques that will account for new modes of rolling and flying.
“We want to develop a better understanding of the scale at which cooperation of rolling and flying is feasible and desirable,” Ordóñez said. “By doing so, new designs for cooperative robots will emerge.”
The researchers recently presented their work at the 2019 International Conference on Intelligent Robots and Systems.